Light-following Robot
Autonomous robot that tracks and follows light sources using real-time sensor feedback and control algorithms.
Overview
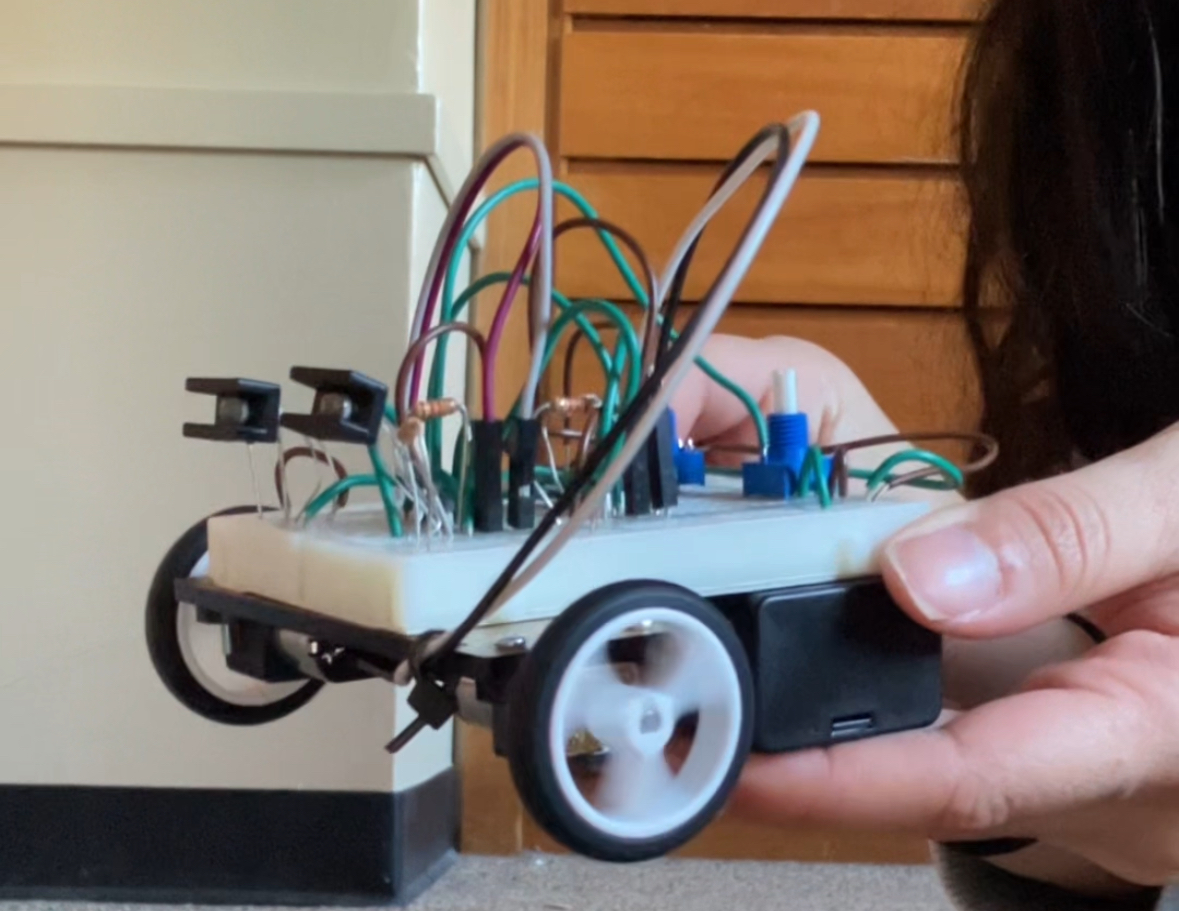
An autonomous mobile robot that seeks and follows a light source in real time. Photoresistors measure differential light intensity across the robot's breadth, feeding a proportional control loop that steers the drivetrain toward the brightest point.
Control System
The control loop reads from multiple photoresistors, computes an error signal based on the left/right light differential, and drives the motors proportionally. Tuning the gain ensures smooth tracking without oscillation around the target.